本文是我在上UCSD的 CSE 120: Principles of Operating Systems (Winter 2020) 整理的笔记,这一课主要介绍了操作系统里面对内存的分配以及管理方式
Basic
Allocation of memory occurs when
- new process is created
- process requests more memory
Freeing of memory occurs when
- process exits
- process no longer needs memory it requested
Memory overview
Porcess memory store:
- Text: code of program
- Data: static varibales, heap
- Stack: automatic variables, activation records
- Other: shared memory regions
Process memory address space
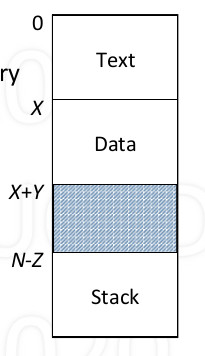
Address space
- set of addresses to access memory
- Typically, linear and sequential
- 0 to N-1
Example (right):
- Text of size X at 0 ~ X-1
- Data of size Y at X ~ X+Y-1
- Stack of size Z at N-Z ~ N-1(grow reversely)
Compiler’s model of memory
Compiler generates memory address
- Address ranges of text, data, stack
- allow data and stack to grow
What is not known in compiler
- Physical memory size
- Allocated region of physical memory
Memory characteristics
- Size, fixed or variable (max size)
- Permission: r, w, x
Goal: support multiple processes
Support programs running “simultaneously”
- implement process abstraction
- Multiplex CPU time over all runnable processes
- Disk r/w speed is low: must keep multiple processes in memory
Process requires more than CPU time: memory
Memory issues and topics
- Where should process memories be placed? -> Memory Management
- How does the compiler model memory? -> Logical memory model, segmentation
- How to deal with limited physical memory? -> Virtual memory, paging
- Machanism and Policies
Memory Managemeng Implementation
example process
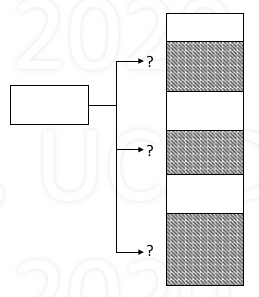
- Phsical memory starts as one empty “hole”
- When processes are created, areas get allocated
To allocate memory
- find large enough hole
- allocate region within hole
- mostly leaves smaller hole (when the hole size does not exactly match the size of process memory)
- when process exit (or memeory no longer needed), release that area, which create a new hole, coaleasce with adjacent
problem: if there are multiple holes, which to select?
First fit: simple, fast
- consider tradeoff: fit vs. search time
- memory is cheap, time is expensive
Best fit: optimal, must check every hole, leaves very small fragments
- Worst fit: leaves large fragments, must check every hole
complication: is region fixed or variable size?
Fragmentation
- Over time, memory becomes fragmented, there may be signficant unused space (fragmented)
Internal fragmentation
- Unused space within (allocated) block
- Cannot be allocated to others
- Can come in handy for growth (for stack or heap)
External fragmentation
- Unused space outside any blocks (holes)
- Can be allocated (too small/not useful)
Approaches
Compaction
- Simple idea
- Very time consuming
Break block (to be allocated) into sub-blocks
- Easier to fit
- But complex
Use pre-sized holes
Same-sized holes:
- all holes same, easy allocation
- may be too small which is inflexible
Varaiety of sizes (small, medium, large)
- more flexible
- complex
- what should sizes be? how to determine
Not adaptable, cause internel fragmentation
Some rules
50% Rule: m = n / 2
- Block: an allocated block
- Hole: free space between blocks
- m = number of holes
- n = number of blocks
Unused Memory Rule: f = k / (k + 2)
- Given average size of blocks and holes are known
- b = average size of blocks
- h = average size of holes
- k = h / b, ratio of average hole-to-block size
- f = k / (k + 2) is fraction space lost to holes
Usage:
- k = 1, f = 1/3 -> avg hole size = avg block size, 33% waste
- k = 2, f = 1/2 -> avg hole size = 2 * avg block size, 50% waste
- k = 8, f = 4/5 -> avg hole size = 8 * avg block size, 80% waste
Limits
In general, f increases with increasing k
- as $k \rightarrow \infty, f \rightarrow 1$
Alternatively, f decreases with decreasing k
- as $k \rightarrow 0, f \rightarrow 0$
The Buddy System
- Partition into power-of-2 size chunks
Allocation: given request for size r
1
2
3
4find chunk larger than r (else return failure)
while (r < sizeof(chunk) / 2)
divide chunk into buddies (each 1/2 size)
allocate the chunkFree: free the chunk and coalesce with buddy
1
2
3free the chunk
while (buddy is also free)
coalesceData structure for buddy-system -> binary tree