本文是我在上UCSD的 CSE 120: Principles of Operating Systems (Winter 2020) 整理的笔记,第三课主要介绍了操作系统里面进程调度的一些基本算法以及相关的一些分类。
Basic problem and goal
Problem introduction
- Given multiple processes and one CPU, which process gets CPU and when?
- How much CPU time does each process get?
- Possible approaches:
- Let one process keep CPU till done then switch to another
- Each process uses CPU a bit and passed it on
- Ech process gets proportinal to what they pay (demand)
- Which policy(ies) is the best?
- Depends on the goals of the system
- Personal computer
- Large time-shared computer
- computer controlling a nuclear power plant…
- Even one system might have multiple(and somtimes conflicting) goals
- Depends on the goals of the system
Some parameters needed in scheduling
- Arrival time: time that process is created
- Service time: CPU time needed to complete (most time unknown to the kernel)
- Turnaround time: from arrival to departure (actually time needed to finish the process, including running time and waiting time)
- Try to minimizes average turnaround time
Different scheduling policies
Let one process run till done (non-preemptive)
Consider the service time for each process (suppose each process arrived at the same time)
- Longest first vs shortest first: Let the longest/shortest processes among all the process created and not yet exit to run till done and then decide the next
- Proven: Shortest first is optimal
- However, the service time is unknown to the kernel in most of the time
Consider the arrival time
- First come first serve(FCFS) vs Last come first serve(LCFS): Allocate the CPU to process arrived earliest or latest.
- First come first serve(FCFS)
- non-preemptive, simple, no stavation
- poor for short process arrived late
- Last come first serve(LCFS)
- simple
- starvation, poor for short process arrived early
Shortest process next (SPN)
- when one process finish, select the process with shortest service time
- Proven: optimal for non-preemptive policies
- may cause starvation (when short process keep arriving, long process get no chance to run)
- However, the service time is unknown to the kernel in most of the time
Select process when each quantum end (preemptive)
Round Robin (RR)
- Time-slice: each process gets quantum in turn
- Preemptive, simple, no starvation
- Each process waits at most (n - 1) x quantum (supposed n is fixed)
Shortest remaing time (SRT)
- At the end of each quantum, select process with shortest remaining time
- Proven: optimal for preemptive policies
- may cause starvation (same case as SPN)
- Assumes service times are known (which is difficult)
Multi-level feedback queues
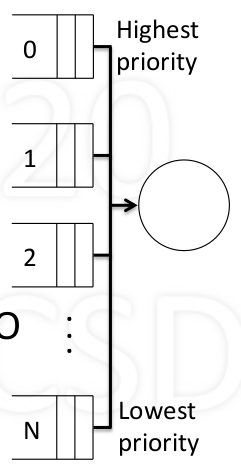
- Priority queues 0 to N (from high to low)
- new processes enter queue 0 (highest priority)
- Each quantum select from highest priority queue (FIFO within the queue)
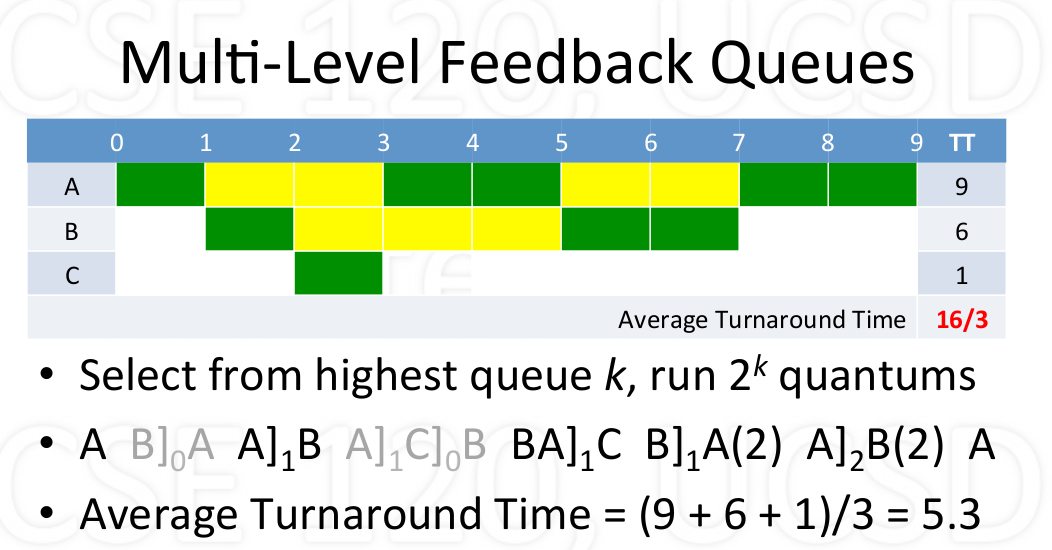
- For each process selected, run it for $T = 2^k$ quantums
- if the process used T quantums, move it next loewer queue
- if the process used less than T quantums, back to same queue
- due to yield or higher priority arrival
- Periodically boost (all to the queue 0)
- Features:
- Complex, adaptive, highly responsive
- Favors shorter over longer, possible starvation (higher priority queue run shorter time)
Example
Priority scheduling
- Select process with highest priority
- Calculate priority based some external criteria
- E.g., priority = $\frac{1}{CPU_{time used}}$
Fair share (Proportional share)
- Assumed ach process requests ome CPU utilization
- Goal: utilization over long run, actual $\approx$ request
- Select process with minimum actual/request ratio, when some processes have same minumum ratio, randomly choose one.
- involving float number calculation in each quantum, maybe over head.
Stride shceduling (practical implementation for Fair share)
- For each process x with certain CPU utilization requested, calculate strides: $S_x = \frac{1}{R_x}$
- For each process x maintain pass value $P_x$ (initialized 0)
- In each quantum:
- Select process x with minimum pass value P to run
- Increment pass value with selected process by its stride value: $P_x = P_x + S_x$
- Optimization: use only intergers for $R_x, S_x, P_x$
- Calucalte $S_x = \frac{L}{R_x}$, where L is very large like 1000000.
Real Time Scheduling
Basics
Reason (correctness) for real-time scheduling
- depends on logical result of computations
- timeing for these result
Type of real-time systems
- hard vs. soft real-time
- Periodic vs. aperiodic
Type of processes
Periodic Process (Tasks)
- A periodic process has a fixed frequency at which it needs to run.
- Before each deadline it must run for a certain CPU time
- For each process with a period, we have C (CPU burst needed), T (period), U (C/T, utilization)
Example
Aperiodic Process
- Aperiodic processes have no fixed, cyclical, frequency between events.
- For this type of process, real-time scheduling is not necessary
Different real-time Scheduling
Earliest Deadline First (EDF)
- schedule process with earliest deadline
- if a earlier deadline process appears, preempt
- Pros:
- works for periodic and aperiodic processes
- Achieve 100% utilization (igoniring overhead)
- Cons:
- Expensive: requires ordering by deadline frequently
Example:
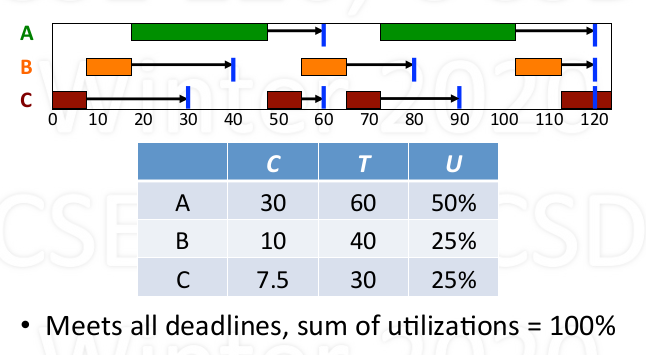
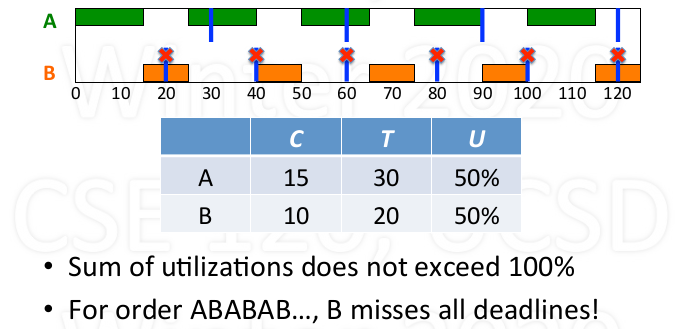
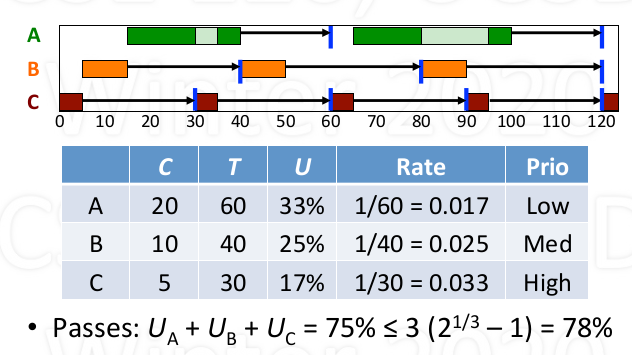
Rate Monotonoic Scheduling (RMS)
- If periodic processes exist, priorityize based on rates
- At start of period, select highest priority
- Preempty if necessary
- When burst done, wait till next period
- Deadline met require: $U_1 + … + U_n \leq n (2 ^ {1/n} - 1)$
Example:
More on RMS
- RMS is simple and efficient (static priority)
- RMS is optimal for static priority algorithms
- if RMS can’t schedule, no other static priority can
- RMS is limited in what it guarantees
- Utilization bounded by $n(2^{1/n}-1) > \ln{2}$ ~ 69%
- if bounded exceeded, no guarantess (but may not fail)
- RMS is limited to periodic processes
Summary
| scheduling policy | feature |
|---|---|
| FCFS | very simple, non-preemptive |
| RR | simple, preemptive |
| SPN | threoretical, non-preemptive |
| SRT | threoretical, preemptive |
| MLFQ | adaptive, reponsive, complex |
| Priority | external criteria |
| FS | proportional allocation |
| EDF | 100% utilization, high overhead |
| RMS | < 100%, low overhead |